|
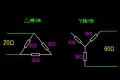
图2 故障分量差动保护动作特性
Fig.2 Operating characteristic of fault
component based differential protection
综合判据的表达式为:

(10)
还可以用标积制动量构成比率制动判据[3]:

(11)
式中  ;S为标积制动系数,S%26gt;0。 ;S为标积制动系数,S%26gt;0。
根据余弦定理,不难证明式(10)中的K与式(11)中的S的关系为:

(12)
若令  ,可以导出式(11)中标积制动量的算法为: ,可以导出式(11)中标积制动量的算法为:

(13)
上述分析表明,动作判据式(11)与式(10)在原理上是基本一致的。不过,用式(11)更容易理解采用故障分量后,不仅可以提高保护对内部故障的灵敏度,而且也可加强对外部故障的制动作用。采用故障分量的特点是完全消除了负荷电流的影响,或者说在故障附加网络中,移去了被保护的设备两侧的等值系统电源电势,而只在故障点处还保留唯一的一个故障分量电势。外部故障时,故障分量电势位于区外,由它引起穿越性故障分量电流。对被保护设备两侧测量点而言,两侧测量电流几乎是完全反相的(“几乎”是指传感器或测量元件会引入相位误差,下同),即θ≈π,在判据式(11)中将产生很大的制动量,而动作量很小,可确保可靠的制动作用。内部故障时,故障分量电势位于区内,由它引起从被保护设备两侧流出的电流,因而两侧测量点测得的故障电流几乎是完全同相的,即θ≈0°①,在判据式(11)中动作量很大,而制动量为负,故保证了对内部故障的灵敏度,并较小地受故障过渡电阻的影响。
2.2 多侧电流相量构成的比率制动判据
对三绕组变压器差动保护或发电机—变压器组差动保护(大差)等,需要用到3侧或更多侧电量来构成故障分量比率制动特性。此时动作判据仍可采用式(10),但该式中各量的组成将发生变化。对于M侧(M%26gt;2),电流差动保护的动作量ΔId应取为:
(14)
而制动量ΔIr常有3种取法,分别如式(15)、式(16)、式(17)所示:

(15)
(16)

(17)
Δ max满足 max满足 , , 。 。
对于由式(10)、式(14)及式(17)构成的判据,可以认为是将多侧比率差动转换成两侧比率差动来实现,因此与图2的特性完全一致,并且这组判据很容易用标积制动量构成,表达式如下:

(18)
式中 
式(12)所示关系和式(13)所表达的算法可直接应用于式(18)。
对于由式(10)、式(14)及式(15)构成的判据,其制动量式(15)在多数情况下较式(17)偏弱;而对于由式(10)、式(14)及式(16)构成的判据,其制动量式(16)在多数情况下较式(17)偏强,必要时可采取一些措施。
更一般地,式(10)亦可表达为另一种形式:

(19)
显然,对于图2的动作特性有:
(20)
若取 ,斜线将沿横轴(ΔIr轴)向正方向平移,这有利于改善灵敏度,但会劣化制动特性,故一般要求ΔIr.min%26lt;0.8In;反之若取ΔIr.min%26lt; ,斜线将沿横轴(ΔIr轴)向正方向平移,这有利于改善灵敏度,但会劣化制动特性,故一般要求ΔIr.min%26lt;0.8In;反之若取ΔIr.min%26lt; ,斜线将沿横轴向负方向平移,这有利于增强制动性,但会劣化灵敏性。一般应使ΔIr.min≥-,等号成立时斜线将与纵轴在ΔId.min处相交。 ,斜线将沿横轴向负方向平移,这有利于增强制动性,但会劣化灵敏性。一般应使ΔIr.min≥-,等号成立时斜线将与纵轴在ΔId.min处相交。
因此对于由式(10)、式(14)及式(15)构成的判据,可取ΔIr.min≤;而对于由式(10)、式(14)及式(16)构成的判据,可取ΔIr.min≥,并一般应遵守前面讨论的原则。
2.3 具有双曲线型非线性制动特性的判据
折线比率制动判据反映了非线性制动要求,但它们是由分段直线构成的,而外部故障时由于TA误差引起的ΔId与ΔIr在ΔId-ΔIr平面上通常表现为更为平滑的曲线,因而需要探讨直接采用曲线制动特性的判据。如一条开口向上并对称于纵轴的双曲线的右支,开始上升慢,后来上升快,且最终趋近的斜率是稳定的,比较适合用来实现非线性制动特性。这种双曲线制动特性判据一般可表示为:

(21)
式中 K0,K″及KC均为与动作特性有关的正常数,式(21)应满足双曲线的基本条件[3]。
合理选择K0,K″和KC可以灵活实现各种不同的双曲线制动特性判据,如令K″=1时,式(21)可以演变为:

(22)
式中
式(22)表明标积制动量与ΔId配合可以构成双曲线制动特性。S0确定了双曲线的顶点;K0-KC为渐近线在纵轴的截距,它控制双曲线随制动量增加而上升的速度,截距越负,上升速度越慢。只要选择合理,可以得到比较理想的非线性制动特性。
2.4 利用瞬时采样值的比率制动判据
直接用瞬时值比较来实现差动保护可以明显提高保护动作速度和减少计算量,这对于某些场合(如发电机纵差保护、母线差动保护等)是非常有价值的。其应用也分两侧或多侧差动保护两种(可参考第2.1节和2.2节)。故障分量的计算一般采用“周周比较法”。此外,为保证动作的正确性,可以采用“多点表决法”,即在连续m次计算中有n(n≤m)次满足条件,则判定为内部故障[1]。
3 故障分量比率差动保护的应用
WYB—01型发电机—变压器组微机成套保护装置按3侧量(变压器高压侧,发电机中性点及厂用变分支)构成故障分量相量差动原理设计,采用动作判据如下。
3.1 比率制动判据
采用式(19)所示判据,其中动作量ΔId和制动量ΔIr分别如式(14)和式(15)所示(M=3)。
3.2 辅助判据
3.2.1 励磁涌流闭锁判据
ΔId2%26gt;Kd21ΔId1
(23)
式中 ΔId1,ΔId2分别为差流中基波和二次谐波电流故障分量幅值;Kd21为二次谐波比率制动系数。
3.2.2 差流速断判据(满足时直接出口)
ΔId%26gt;KdsIn
(24)
式中 In为额定电流;Kds为额定电流倍数。
TA断线闭锁判据等其他辅助判据从略。
3.3 讨论[4]
3.3.1 正确选择整定值
一般地,故障分量比率制动判据有3个定值,即ΔId.min,ΔIr.min和K,这与传统的两段折线比率制动判据中3个定值Id.min,Ir.min和K0相对应,故可参考后者来确定前者②。第1节分析认为:故障分量比率差动保护判据中的差动量与传统比率差动保护判据中的差动量基本相当,但故障分量有效地消除了正常不平衡电流,故ΔId.min可比Id.min取得略小一些。故障分量判据中的制动量由于去除了负荷分量影响,从绝对值上看较传统判据中的制动量略小,因此ΔIr.min应比Ir.min取得更小一些,以保证制动作用。根据前面的分析,故障分量判据中的比率制动系数K只要满足K%26lt;1,即使取大一些也不会影响保护灵敏度和制动作用,因此K可比K0取得大。
故障分量差流门坎值ΔId.min与装置的测量精度密切相关(下面还将讨论),一般取为(0.2~0.5)In。例如取ΔId.min=0.3In③。
比率制动系数K一般可取0.3~0.8,建议取大一些。
拐点制动电流的选取与斜线方程及ΔId.min,K值有关。当取斜线方程过原点时,有ΔIr.min=Id.min/K,按照前述建议,则有ΔIr.min取(0.375~1.0)In。对于WYB—01型发电机—变压器组保护采用的故障分量比率差动判据,由于制动量选择偏小,故斜线可适当向横轴左方平移。运行经验表明应使ΔIr.min≤0.7In④。
3.3.2 尽量减小精工电流
这里主要指减小差流故障分量ΔId的最小精确测量电流。这可使ΔId.min降低,从而有利于改善对轻微内部故障的灵敏度,或者在同等ΔId.min情况下,提高保护动作的安全性,为此需要注意以下问题:
a.保证各电流模拟通道的一致性。就装置而言,主要指装置的电流输入变换器、低通模拟滤波器、采样保持器、多路转换器直至A/D前各个电流通道的稳态和暂态特性应尽量保持一致。这除了对工艺水平、元器件质量等提出高标准要求外,还要求各通道尽量同时采样。
b.提高A/D变换的精度,降低A/D变换电路的内部噪声影响。一般地说,提高A/D变换的分辨率有利于提高变换精度,但这也不尽然。如果精度不高主要是由A/D变换电路(布线乃至器件、供电电源等)内部噪声引起的,那么单纯提高A/D分辨率将于事无补。
c.装置输入额定电流按被保护设备二次实际额定电流选择。装置输入额定电流通常是按TA副方额定电流确定的,如In2=5 A(或1 A)。而不同电厂、不同机组二次实际额定电流比TA副方额定电流有可能小很多。如葛洲坝二江电厂4号机二次实际额定电流仅为2.5 A,这使装置对应设备二次实际额定电流的分辨率大为降低。例如对于12位A/D,考虑允许输入最大电流为额定电流的20倍,那么对于按TA副方额定电流(5 A)选择,则每安对应的数码约为20,对应2.5 A(二次实际额定电流)的数码为50;对于按设备二次实际额定电流(2.5 A)选择,则每安对应的数码约为41,对应2.5 A的数码为102。显然分辨率大为提高,改善了信噪比和测量精度。因此每台装置都应按二次实际额定电流作为其输入额定电流。
参 考 文 献
[1]陈德树.计算机继电保护原理与技术.北京:电力工业出版社,1992
[2]McCleer P J, Fir M. A New Technique of Differential Relaying: The Delta-Differential Relay. IEEE, 1982, 101(10):4164~4170
[3]尹项根.标积制动量的应用与分析.见:全国高校电力系统自动化专业第八届年会论文集.长沙:1992
[4]李毅军.对故障分量原理的微机型发变组差动保护装置在运行中一些问题的探讨.继电器,1996(4)
讨 论
审稿人意见:
①如果内部短路时θ≈0°,外部短路时θ≈π,则S的取值越大越好(越灵敏和越不误动),何必按式(12)决定S值?问题是内部短路时θ?0°。
②正如作者清楚地阐明:ΔId=Id,而ΔIr≠Ir,ΔId.min≠Id.min,即增量差动在概念上不同于传统差动,所以整定计算时完全不必“仿效”或“参考”。
③请解释ΔId.min取值之理由。个别装置测量精度较差,要求ΔId.min大,不应推广。
④ΔIr.min取值太大,不能作为一般通用的整定推荐值。
作者答复:
①此段文字是为了说明故障分量原理与传统原理之关键区别而作的简化分析,也是基于一次系统的一种经典分析,从而有内部短路时θ≈0°和外部短路时θ≈π的结论。正是由于实际应用的复杂性,应通过式(12)由K值来确定S值,有益于把握特性边界和便于试验检验。
②原文中“参考”的含义是说明ΔId.min,ΔIr.min,K与Id.min,Ir.min,K0的类同关系,并不表示这两组定值完全相等,并且原文紧接着阐述了这之间的差别,在思路上和审稿人的意见是一致的。
③原文中已经分析指出故障分量判据中的差动量和传统判据中的差动量是基本相当的,但故障分量有效地消除了正常不平衡电流,故ΔId.min可比Id.min取得略小。这也表明,以往的经运行考验的整定经验是值得参考的,原文中建议ΔId.min取为(0.2~0.5)In正是反映了国内被普遍认可的运行经验。
④原文中建议ΔIr.min≤0.7In并不排斥为增加制动性选择较小的ΔIr.min。具体选择时将由设计和运行人员选定,只要保证运行安全即可。
[编者按]为了进一步活跃学术讨论的气氛,开拓思路,供读者深入探讨、研究,本刊拟将部分审稿意见及作者答复随原文刊出。我们将审稿人对原稿有疑问处用下划线标出,并按顺序编号,在文后讨论中提出审稿意见,并由作者一一答复。感谢作者尹项根教授及审稿人为本刊这种讨论方式作首次尝试。 |