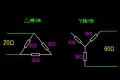
摘要:串级调速是通过绕线式异步电动机的转子回路引入附加电势而产生的。它属于变转差率来实现串级调速的。与转子串电阻的方式不同,串级调速可以将异步电动机的功率加以应用(回馈电网或是转化为机械能送回到电动机轴上),因此效率高。它能实现无级平滑调速,低速时机械特性也比较硬。非凡是晶闸管低同步串级调速系统,技术难度小,性能比较完善,因而获得了广泛的应用。要害词:异步电动机串级调速原理基本类型 串级调速是通过绕线式异步电动机的转子回路引入附加电势而产生的。它属于变转差率来实现串级调速的。与转子串电阻的方式不同,串级调速可以将异步电动机的功率加以应用(回馈电网或是转化为机械能送回到电动机轴上),因此效率高。它能实现无级平滑调速,低速时机械特性也比较硬。非凡是晶闸管低同步串级调速系统,技术难度小,性能比较完善,因而获得了广泛的应用。 一、串级调速原理及基本类型 1.1原理 假定异步电动机的外加电源电压U1及负载转矩ML都不变.则电动机在调速前后转子电流近似保持不变。若在转子回路中引入一个频率与转子电势相同,而相位相同或相反的附电势Ef则转子电流为 (式—1) 式中:R2:转子回路电阻; sX20:转子旋转时转子绕组每相漏抗 E20:转子开路相电势 电动机在正常运行时,转差率s很小,故R2≥sX20。忽略sX20有 (式—2) 上式中,E20为取决于电动机的一个常数,所以,改变附加电势Ef可以改变转差率s,从而实现调速。 设当Ef=0时电动机运行于额定转速,即n=nN,s=sN,由(式—2)可见,当附加电动势与转子相电势相位相反时(Ef前取负号),改变Ef的大小,可在额定转速以下调速,这种调度方式称为低同步串级调速,且附加电势与转子相电势相位相同时(Ef前取正号),改变Ef的大小,可在额定转速以上调速,这种调度方式称为超同步串级调速(即s<0)。 串级调速四种基本状态方式下能量传递方式如下图示,图中不计电动机内部各种损耗,即认定定子输入功率P即为转子输出功率。 晶闸管低同步串级调速系统是在绕线转子异步电动机转子侧用大功率的晶闸管或二极管,将转子的转差频率交流电变为直流电,再用晶闸管逆变器将转子电流返回电源以改变电机转速的一种调速方式。 晶闸管低同步串级调速系统主回路见下图二、串级调速系统主回路主要设各的参数计算与选择 1.异步电动机容量的选择 考虑到异步电动机输出的最大转矩的降低,功率因数的降低和转子损耗增大等因素,不论对于新设计的或是改造的都应对异步电动机的容量进行重新选择的计算,串级调速异步电动机的容量P计算如下: P=Ki*PD 式中:Ki:串级调速系数,一般取1.2左右。对于在长期低速运行的串级调速系统,应该取大一点。 PD:按照常规运算方式计算的电动机容量。 从产品手册中选择的电动机容量P≥PD 本设计采用的是哈尔滨九洲电气股份有限公司的内反馈串级调速电机及其控制装置技术手册提供的有关数据设计而成。 该电机定额为连续定额S1,基本防护等级为IP23,基本冷却方法为ICO1,基本结构和安装方式为IBM3。 控制电机型号 JRNT1512-4 额定功率 1050KW 额定电流 121.5A 转子电压/电流 1045V/627A 最高/最低转速 1484/690r/min 效率 88.5 功率因数 0.83 控制装置型号 JC4---800A/800V 2.转子整流器的参数计算与元件选择 (1)最大转差率 式中:n1:电动机的同步转速,近似等于电动机的额定转速。 nmin:串级调速系统的最低工作转速 D:调速范围 转差率s=(1500-1484)/1500=0.01 最大转差率smax=(1484―690)/1484=0.535 D=nmax/nmin=1484/690=2.15。 (2)转子整流器的最大输出电压 式中:E20:转子开路相电势 KUV:整流电压计算系数,见下表: 则Udmax=1.35*1045*(1-1/2.15)=755V (3)最大直流整流电流 式中:λm:电动机的电流过载倍数,近似等于转矩过载倍数2 I2N:转子线电流额定值 KIV:整流电压计算系数,见上表 Idr:转子整流器输出直流电流额定值Idr=I2N/KIV 1.1:考虑到转子电流畸变等因素的影响而引如的系数 则Idmax=1.1*2*627/0.813=1697A 4、整流二极管的选择 4.1)整流二极管电压的选择 设每个桥臂上串联的整流二极管数目为N=3,则每个二极管的反向重复峰值UKRM为 式中:KUT:电压计算系数,见上表 E2n:转子开路相电势 KAV:均压系数,一般取0.9。对于元件不要串联时取1 由上式可见,整流二极管所承受的最高电压与最低电压与系统的调速范围D有关,调速范围越高,元件承受的电压越高 则:UKRM≥1.5*1.35*1045*(1-1/2.15)/(0.9*3)=419V 4.1)整流二极管电流的选择 在大容量串级调速系统中,需要将几个整流二极管并联使用。设并联支路数为Np =3则每个整流二极管的电流计算如下: 式中:KIT:电流计算系数,见上表 Idmax:转子整流器最大直流整流电流 KAC:均流系数。其值可取0.8~0.9。对于元件不并联的情况下取1 (5)逆变嚣的参数计算与元件选择 5.1)逆变变压器的参数计算 对于不同的异步电动机转子额定电压和不同的调速范围、要求有不同的逆变变压器二次侧电压与3其匹配;同时也希逐转子电路与交流电网之间实行电隔离,因此一般串级调速系统中均需配置逆变变压器。 (1)逆变压器二次侧线电压: 根据最低转速时转子最大整流电压与逆变器最大电压相等的原则确定: 式中:UT2:逆变变压器二次侧线电压 Udmax:转子整流器最大输出直流电压 KUV:整流电压计算系数。见上表。 Βmin:最小逆变角,一般取30o (2)逆变变压器二次侧线电流: 式中:IT2:逆变变压器二次侧线电流 KIV:整流电流计算系数。见上表 IdN:转子整流器输出直流电流额定值 (3)逆变变压器一次侧线电流: 式中:IT1:逆变变压器一次侧线电流 KIL:变压器一次侧线电流计算系数。见上表 KT:逆变变压器的变比 (4)逆变变压器等值容量: 式中:KST:变压器等值容量计算系数,见上表 5.2)晶闸管的参数计算 (1)晶闸管额定电压的选择 在大容量晶闸管串级调速系统中,单个晶闸管的额定电压不能满足要求,需要几个晶闸管串联使用。设每个串联桥臂上晶闸管的数目为N,则每个晶闸管反向重复电压由下式确定: 式中:KUT:电压计算系数,如上表 KAV:均压系数,其值可取0.8~0.9。对于元件不需串联的情况下取1 UT2:逆变变压器二次侧线电压 (2)晶闸管额定电流的选择 设每个桥臂并联元件支路数为Np,则每个晶闸管的额定电流为 式中:KIT:电流计算系数,见上表 Idmax:转子整流器最大直流整流电流 KAC:均流系数。其值可取0.8~0.9。对于元件不并联的情况下取1 (6)平波电抗器电感量的计算 转子直流回路平波电抗器的作用是:一,使串级挑速在最小工作电流下仍能维持电流的连续;二,减小电流脉动,把直流回路中的脉动分量在电动机转子中造成的附加损耗控制在答应的范围内。 平波电抗器的电感量计算如下: 6.1)保证电流连续所需要的电感量 式中:δ1:正比与直流电压中的交流分量的电感计算系数,从下图中查 UT2:逆变变压器二次侧线电压 KUV:系数,见上表 Idmin:直流回路最小工作电流(A) LM:异步电动机折算到转子侧的每相电感量( LT:逆变变压器折算到二次侧的每相电感量 6.2)限制电流脉动的电感量 式中:Kp:限制电流脉动的电感系数(ms),其值从下表中查 σ:答应的电流脉动率,一般可取10左右。 6.3)平波电抗器的电感量 7.启动方式的选择 7.1、利用串调装置直接启动方式 如上图a示,它不用任何附加起动设备,而是由串级调速装置控制直接起动电动机。这种调速方式适用于串级调速系统的调速范围很大.几乎要求能从零开始调速或者生产机械对起(制)动的加(减)速度有一定要求的场合。 对于调速范围较小的系统,若选用直接起动方式,是不经济的。另外,对于一个按实际调速范围设计的调速范围较小的串级调速系统,若采用直接起动,则在主回路中会造成较大的冲击电流,且往往超过答应限度。因此,对于调速范围较小且对起(制)动加(减)速度无非凡要求的串级调速系统,宜采用以下两种起动方式。 7.2、并联防加起动设备的切换起动方式 如上图b示,电动机先用接触器KM1接入附加起动电阻器(或频敏变阻器)起动加速(此时KM2是断开的),当加速到串级调速系统设计的调速范围最低速nmin时,接通KM2,这时逆变控制角β应为最小值βmin,即对应于最高逆变电压Uβmax。然后断开KM1,逐渐增大β,电动机继续加速,直到所需要的转速. 这种起动方式虽然增加了一套附加起动设备,但转于回路主要设备的耐压和容量只需按调运范围的要求来选择,从设备的总投资上来看是经济合理的。这种方式还有一优点,即一旦串级调连装置发生意外故障,异步电动机可以脱离串调状态,而用附加起动设备正常起动到高速运行。 7.3、串联起动电阻器起动方式 如图(c)所示,在起动过程中把限流的起动电阻逐渐短接,这种接线方式虽然逆变变压器的二次侧电压只得按调速范围的大小来选择.但是转子囚路主要设备元件选用的耐压等级仍需按从零开始调速的条件来设计,为克服这一缺点可采用图d的接线方式。起动时先将KM3接通,当电动机加速到串调装置设计的调速范围员低速时,断开KM3,串调装置自动投入运行。 8、继电器接触器控制电路设计 继电器接触器控制电路设计是否合理,关系到串调装置能否按正确的顺序起动、切换、运行、停车,还关系到装置的安全及元件的使用寿命。在设计中要注重以下几点: 1.必须有严格的起动和切换顺序。由于串调装置中硅元件的耐压等级是按照调速范围最低转速时所承受的电压来选择的,故继电操作电路必须保证电动机转速在达到规定的最低转速以上时才答应切换至串调运行状态。起动顺序是:给控制回路送电;接通逆变器主电源转子接入频敏变阻器,接通定子电源,电动机开始起动,电动机加速至规定转速时切换至串调运行,此后立即切断频敏变阻器。 2.必须有正确的停车顺序。一般绕线式异步电动机空载励磁电流较大,为电动机额定电流的25%左右,这意味着电动机有较大的磁场能量。因此在电动机分闸时不答应转子开路.否则转子侧将产生严重过电压,甚至击穿电动机绝缘。停车时也不答应切除所有电源,应保证逆变器比整流器迟脱离电网。停车顺序为:使串调装置脱离电动机转子同时接入频敏变阻器;切断电动机定子电源,切断逆变器电源。切断控制回路电源。 3、用户通常要求串调装置能选择“串调运行”及“异步高速运行”两种工作方式,并能相互切换,在切换过程中必须注重,逆变器应比整流器早接入电网,在整流器合闸的情况下,不得断开逆变器电源,否则易造成逆变器颠覆。在切换过程中还应避免转子开路。串调装置发生故障时应将转子电路短接,整流器和逆变器电路断开。