技术
2.1振荡产生的数学机理
根据非线性动力学的理论可知,非线性系统的振荡大致可分为4类:系统周期性振荡、准周期振荡、系统混沌解对应的非周期振荡和平衡点附近运动轨迹对应的负/弱阻尼振荡[14]。但在实际非线性系统中,因存在测量误差,严格的周期振荡、准周期振荡与混沌振荡很难区分,因此可以认为是一种幅值较大的振荡,而平衡点附近的负/弱阻尼振荡是幅值很小的振荡。
2.1.1周期性振荡
若非线性自治动力学系统的状态变量为x(t),输入变量为y(t),描述系统行为的微分方程组为
式中:f为系统的状态方程,g为系统的等式约束。若存在(xe(t),ye(t))满足方程(1),则称之为方程(1)的解。
设T为振荡周期,为一常数,若有
(xe(t),ye(t))=(xe(t+T),ye(t+T))(xe(t),ye(t))=(xe(t+T),ye(t+T))(2)
则该解为周期解或振荡解。
如当参数0<λ<1时,非线性系统[15]的解为
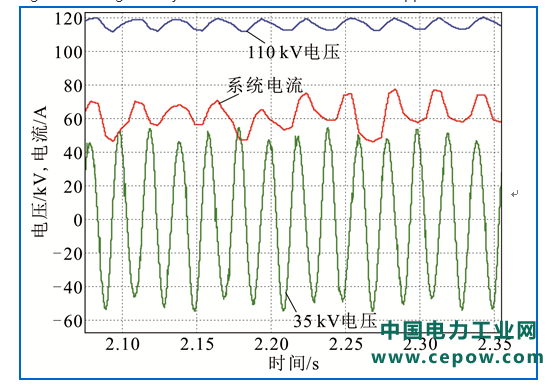
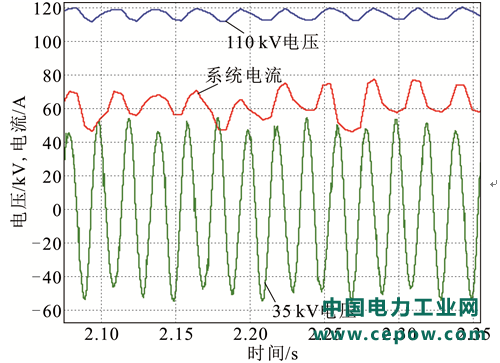
图3振荡发生时的母线电压及系统电流
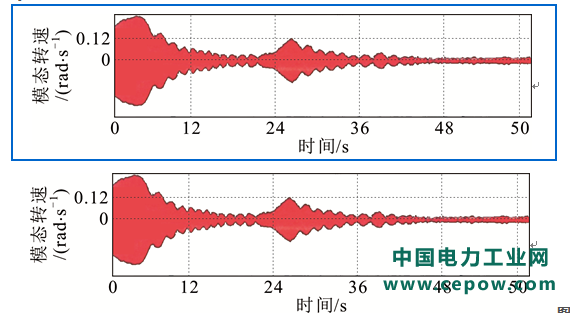
图4 发电机组大轴的模态1振荡
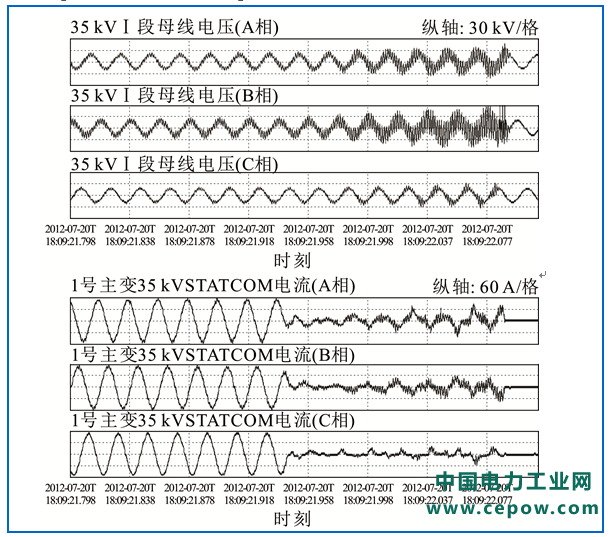
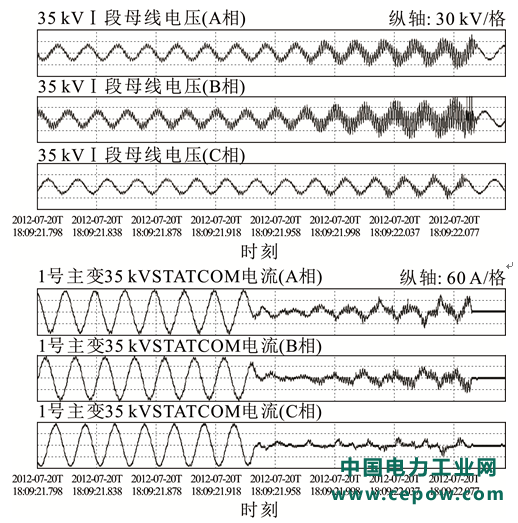
图5 弱系统条件下STATCOM运行中的谐波放大现象
⎧⎩⎨⎪⎪x=y=0x2+y2=1−λ√x2+y2=1+λ√{x=y=0x2+y2=1−λx2+y2=1+λ(4)
如图6所示,当运行于(0,0)时,系统是稳定的,即系统遭受到小扰动后,最终系统将回到点(0,0);当遭受到大扰动后,系统有可能运行于另外两个解对应的极限环,此时系统将发生振荡。
2.1.2混沌引起的非周期性振荡
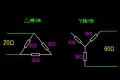
图7为经典的两机系统。E1∠δ1、E2∠δ2分别是两台发电机电动势的幅值和相位,x′d1x′d1、x′d2x′d2是两台发电机的直轴暂态电抗,r1、x1,r2、x2是线路电阻和电抗。描述该系统受电磁功率扰动的微分方程组为[16]
式中:$\delta={{\delta}_{1}}-{{\delta}_{2}}$是两机电势间的相角差;$\omega={{\omega}_{1}}-{{\omega}_{2}}$是两机角频率的差值;D为阻尼系数;$\mu{{P}_{e}}\cos(\rhot)\sin\delta$为电磁功率扰动;$\mu$、$\rho$分别表征扰动的大小和扰动的角频率;Pm、Pe分别为发电机的机械功率与送出的电磁功率;H为轴系的惯性时间常数;Pm、H为常数。在μ=1.1时,系统会进入混沌状态,如图8所示。从状态量转子角、角速度随时间的变化看系统处于振荡状态,但无法识别是混沌状态,而从相图上可以识别是混沌状态。