技术
前面讲了下AlexNet的基本网络结构,大家肯定会对其中的一些点产生疑问,比如LRN、Relu、dropout, 相信接触过dl的小伙伴们都有听说或者了解过这些。这里按paper中的描述详细讲述这些东西为什么能提高最终网络的性能。
一般来说,刚接触神经网络还没有深入了解深度学习的小伙伴们对这个都不会太熟,一般都会更了解另外两个激活函数(真正往神经网络中引入非线性关系,使神经网络能够有效拟合非线性函数)tanh(x)和(1+e^(-x))^(-1),而ReLU(Rectified Linear Units) f(x)=max(0,x)。基于ReLU的深度卷积网络比基于tanh的网络训练块数倍,下图是一个基于CIFAR-10的四层卷积网络在tanh和ReLU达到25%的training error的迭代次数:
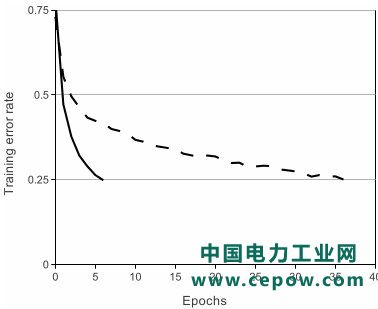
实线、间断线分别代表的是ReLU、tanh的training error,可见ReLU比tanh能够更快的收敛
使用ReLU f(x)=max(0,x)后,你会发现激活函数之后的值没有了tanh、sigmoid函数那样有一个值域区间,所以一般在ReLU之后会做一个normalization,LRU就是文中提出(这里不确定,应该是提出?)一种方法,在神经科学中有个概念叫“Lateral inhibition”,讲的是活跃的神经元对它周边神经元的影响。
Dropout也是经常挺说的一个概念,能够比较有效地防止神经网络的过拟合。 相对于一般如线性模型使用正则的方法来防止模型过拟合,而在神经网络中Dropout通过修改神经网络本身结构来实现。对于某一层神经元,通过定义的概率来随机删除一些神经元,同时保持输入层与输出层神经元的个人不变,然后按照神经网络的学习方法进行参数更新,下一次迭代中,重新随机删除一些神经元,直至训练结束
其实,最简单的增强模型性能,防止模型过拟合的方法是增加数据,但是其实增加数据也是有策略的,paper当中从256*256中随机提出227*227的patches(paper里面是224*224),还有就是通过PCA来扩展数据集。这样就很有效地扩展了数据集,其实还有更多的方法视你的业务场景去使用,比如做基本的图像转换如增加减少亮度,一些滤光算法等等之类的,这是一种特别有效地手段,尤其是当数据量不够大的时候。
GoogLeNet是ILSVRC 2014的冠军,主要是致敬经典的LeNet-5算法,主要是Google的team成员完成,paper见Going Deeper with Convolutions.相关工作主要包括LeNet-5、Gabor filters、Network-in-Network.Network-in-Network改进了传统的CNN网络,采用少量的参数就轻松地击败了AlexNet网络,使用Network-in-Network的模型最后大小约为29MNetwork-in-Network caffe model.GoogLeNet借鉴了Network-in-Network的思想,下面会详细讲述下。
左边是CNN的线性卷积层,一般来说线性卷积层用来提取线性可分的特征,但所提取的特征高度非线性时,需要更加多的filters来提取各种潜在的特征,这样就存在一个问题,filters太多,导致网络参数太多,网络过于复杂对于计算压力太大。
文章主要从两个方法来做了一些改良:
| 1,卷积层的改进:MLPconv,在每个local部分进行比传统卷积层复杂的计算,如上图右,提高每一层卷积层对于复杂特征的识别能力,这里举个不恰当的例子,传统的CNN网络,每一层的卷积层相当于一个只会做单一任务,你必须要增加海量的filters来达到完成特定量类型的任务,而MLPconv的每层conv有更加大的能力,每一层能够做多种不同类型的任务,在选择filters时只需要很少量的部分; 2,采用全局均值池化来解决传统CNN网络中最后全连接层参数过于复杂的特点,而且全连接会造成网络的泛化能力差,Alexnet中有提高使用dropout来提高网络的泛化能力。 |
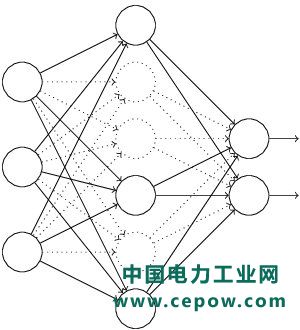
最后作者设计了一个4层的Network-in-network+全局均值池化层来做imagenet的分类问题。
网络基本结果如上,代码见https://github.com/ethereon/caffe-tensorflow. 这里因为作者最近工作变动的问题,没有了机器来跑一篇,也无法画下基本的网络结构图,之后会补上。这里指的提出的是中间cccp1和ccp2(cross channel pooling)等价于1*1kernel大小的卷积层。caffe中NIN的实现(略,请前往原文阅读)
NIN的提出其实也可以认为我们加深了网络的深度,通过加深网络深度(增加单个NIN的特征表示能力)以及将原先全连接层变为aver_pool层,大大减少了原先需要的filters数,减少了model的参数。paper中实验证明达到Alexnet相同的性能,最终model大小仅为29M。
理解NIN之后,再来看GoogLeNet就不会有不明所理的感觉。
痛点:
|
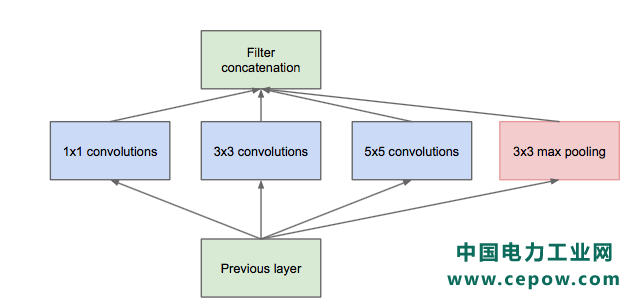
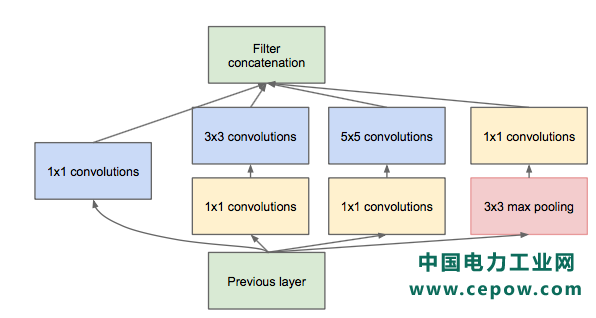
Inception module的提出主要考虑多个不同size的卷积核能够hold图像当中不同cluster的信息,为方便计算,paper中分别使用1*1,3*3,5*5,同时加入3*3 max pooling模块。 然而这里存在一个很大的计算隐患,每一层Inception module的输出的filters将是分支所有filters数量的综合,经过多层之后,最终model的数量将会变得巨大,naive的inception会对计算资源有更大的依赖。 前面有提到Network-in-Network模型,1*1的模型能够有效进行降维(使用更少的来表达尽可能多的信息),所以文章提出了”Inception module with dimension reduction”,在不损失模型特征表示能力的前提下,尽量减少filters的数量,达到减少model复杂度的目的。
在tensorflow构造GoogLeNet基本的代码在https://github.com/ethereon/caffe-tensorflow中(如果懒得找,原文有展示),作者封装了一些基本的操作,了解网络结构之后,构造GoogLeNet很容易。之后等到新公司之后,作者会试着在tflearn的基础上写下GoogLeNet的网络代码。
GoogLeNet为了实现方便,作者用tflearn来重写了下,代码中和caffe model里面不一样的就是一些padding的位置,因为改的比较麻烦,必须保持inception部分的concat时要一致,这里也不知道怎么修改pad的值(caffe prototxt),所以统一padding设定为same,具体代码(略,原文有展示)
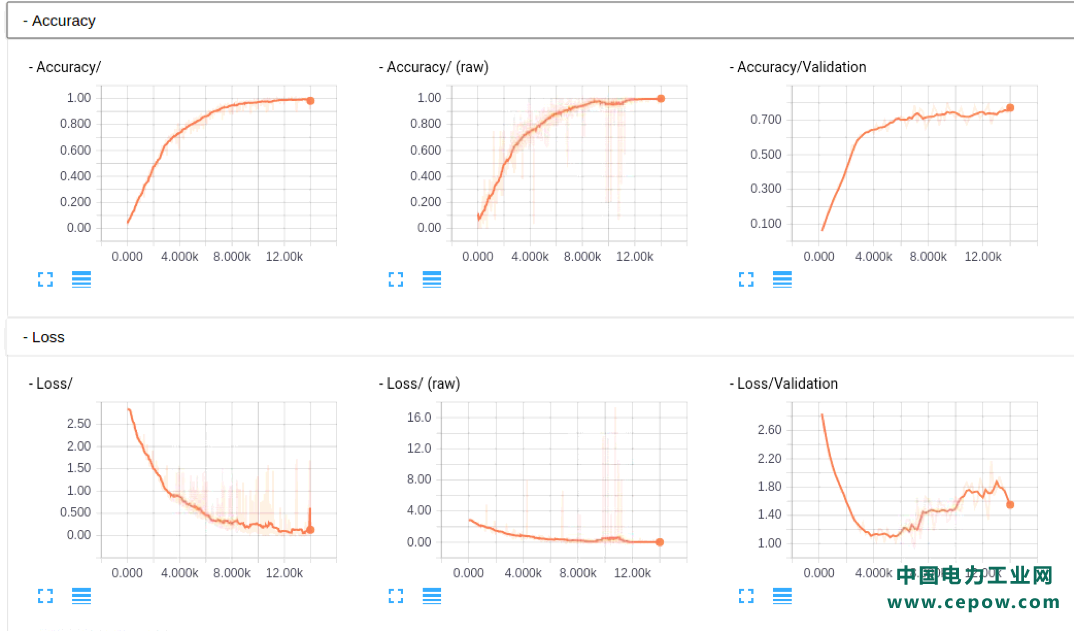
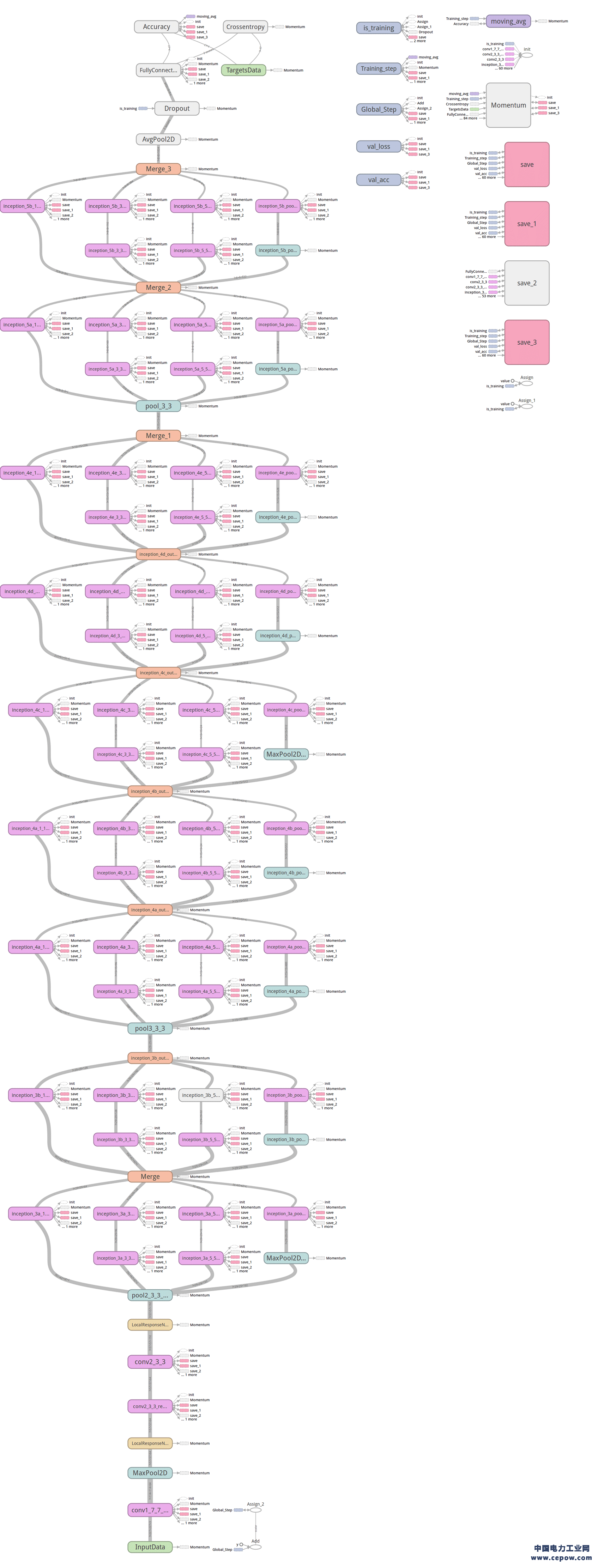
大家如果感兴趣,可以看看这部分的caffe model prototxt, 帮忙检查下是否有问题,代码作者已经提交到tflearn的官方库了,add GoogLeNet(Inception) in Example,各位有tensorflow的直接安装下tflearn,看看是否能帮忙检查下是否有问题,这里因为没有GPU的机器,跑的比较慢,TensorBoard的图如下,不像之前Alexnet那么明显(主要还是没有跑那么多epoch,这里在写入的时候发现主机上没有磁盘空间了,尴尬,然后从新写了restore来跑的,TensorBoard的图也貌似除了点问题, 好像每次载入都不太一样,但是从基本的log里面的东西来看,是逐步在收敛的,这里图也贴下看看吧)
网络结构,这里有个bug,可能是TensorBoard的,googlenet的graph可能是太大,大概是1.3m,在chrome上无法下载,试了火狐貌似可以了:
这段时间到了新公司,工作上开始研究DeepLearning以及TensorFlow,挺忙了,前段时间看了VGG和deep residual的paper,一直没有时间写,今天准备好好把这两篇相关的paper重读下。
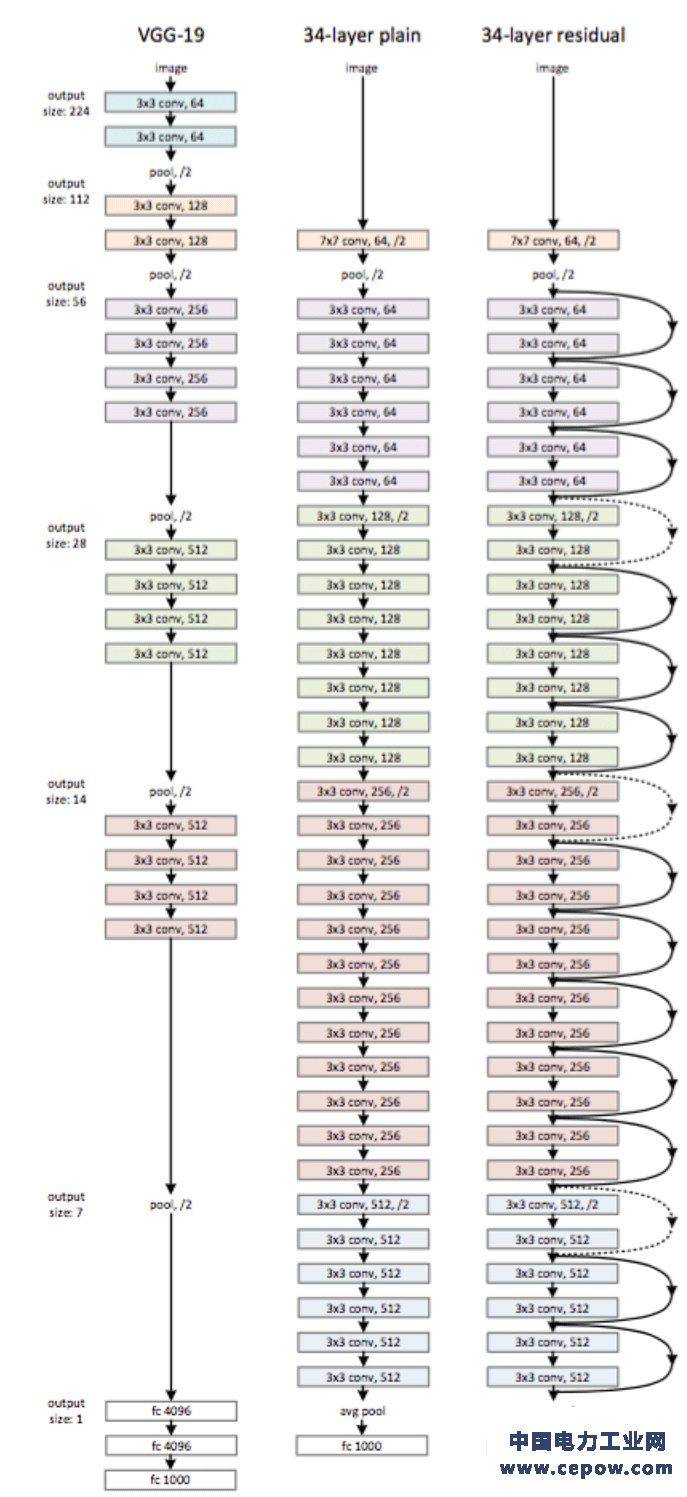
VGGnet是Oxford的Visual Geometry Group的team,在ILSVRC 2014上的相关工作,主要工作是证明了增加网络的深度能够在一定程度上影响网络最终的性能,如下图,文章通过逐步增加网络深度来提高性能,虽然看起来有一点小暴力,没有特别多取巧的,但是确实有效,很多pretrained的方法就是使用VGG的model(主要是16和19),VGG相对其他的方法,参数空间很大,最终的model有500多m,alnext只有200m,googlenet更少,所以train一个vgg模型通常要花费更长的时间,所幸有公开的pretrained model让我们很方便的使用,前面neural style这篇文章就使用的pretrained的model,paper中的几种模型如下:
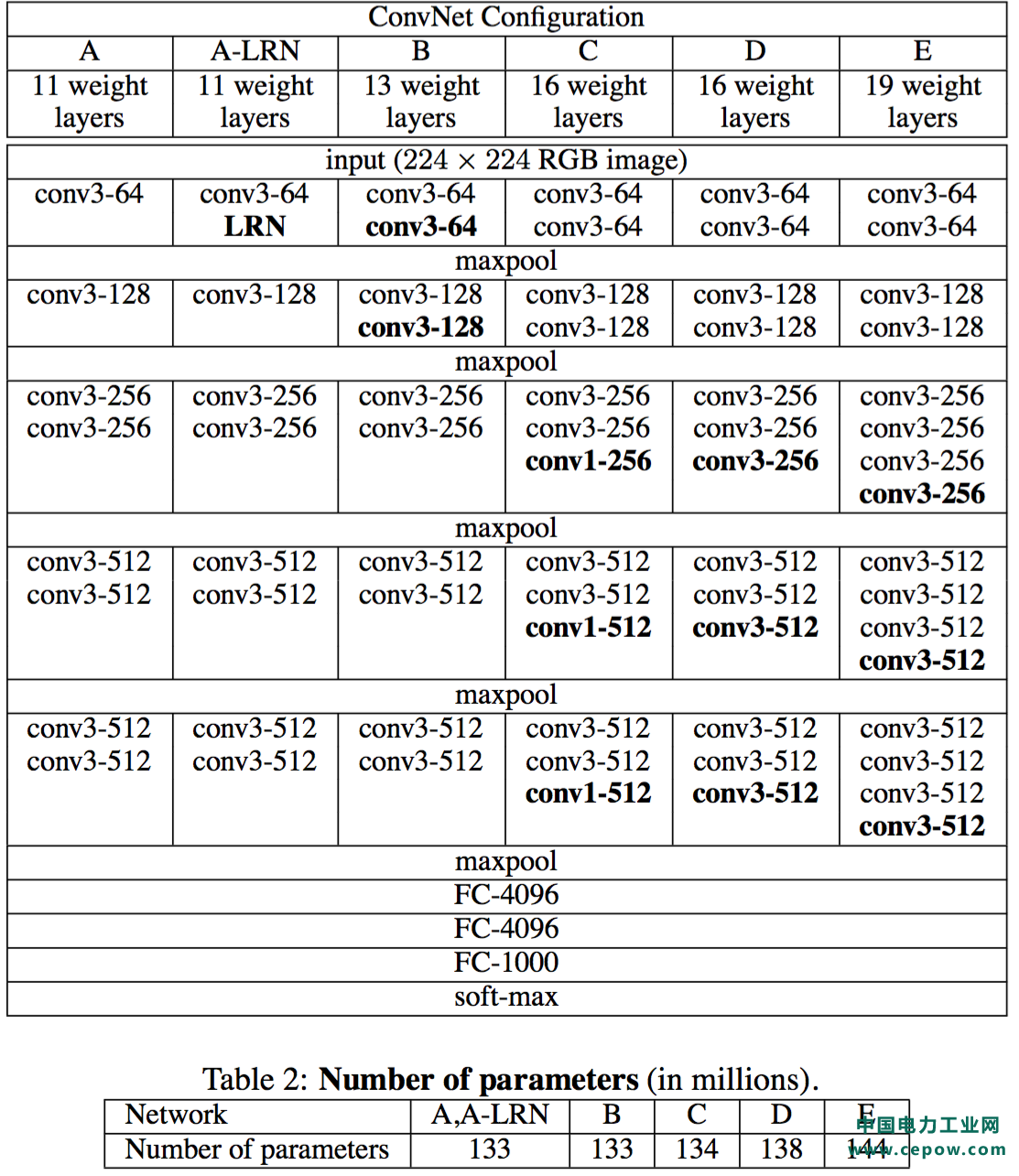
可以从图中看出,从A到最后的E,他们增加的是每一个卷积组中的卷积层数,最后D,E是我们常见的VGG-16,VGG-19模型,C中作者说明,在引入1*1是考虑做线性变换(这里channel一致, 不做降维),后面在最终数据的分析上来看C相对于B确实有一定程度的提升,但不如D、VGG主要得优势在于
|
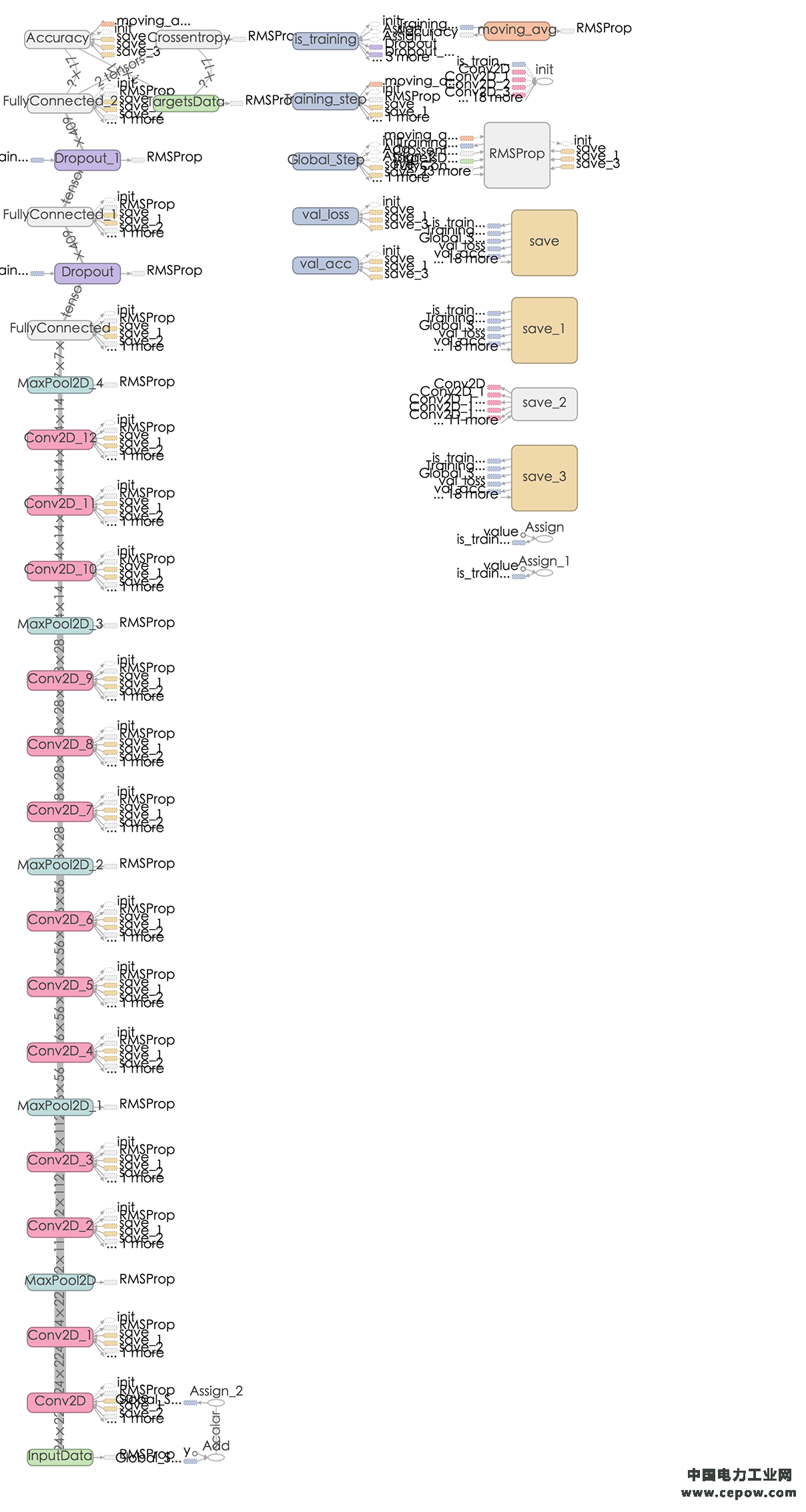
tflearn 官方github上有给出基于tflearn下的VGG-16的实现 from future import division, print_function, absolute_import
VGG-16 graph如下:
对VGG,作者个人觉得他的亮点不多,pre-trained的model我们可以很好的使用,但是不如GoogLeNet那样让人有眼前一亮的感觉。
一般来说越深的网络,越难被训练,Deep Residual Learning for Image Recognition中提出一种residual learning的框架,能够大大简化模型网络的训练时间,使得在可接受时间内,模型能够更深(152甚至尝试了1000),该方法在ILSVRC2015上取得最好的成绩。
随着模型深度的增加,会产生以下问题:
为了解决因深度增加而产生的性能下降问题,作者提出下面一种结构来做residual learning:
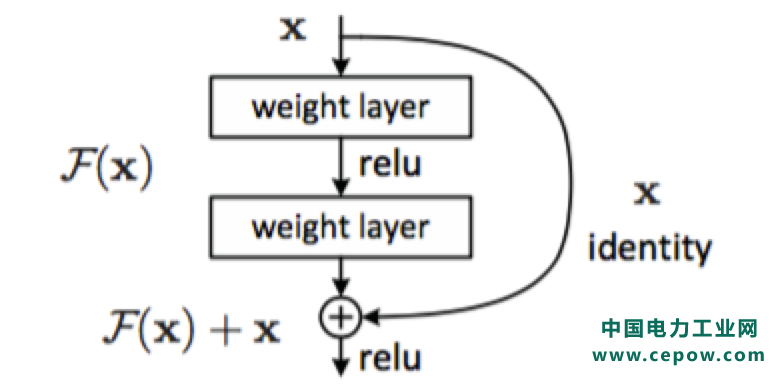
假设潜在映射为H(x),使stacked nonlinear layers去拟合F(x):=H(x)-x,残差优化比优化H(x)更容易。 F(x)+x能够很容易通过”shortcut connections”来实现。
这篇文章主要得改善就是对传统的卷积模型增加residual learning,通过残差优化来找到近似最优identity mappings。
paper当中的一个网络结构:
Deep Residual Network tflearn实现原文里面有详细的介绍。
前面几篇文章讲述了在Computer Vision领域里面常用的模型,接下来一段时间,作者会花精力来学习一些TensorFlow在Computer Vision领域的应用,主要是分析相关pape和源码,今天会来详细了解下fast neural style的相关工作,前面也有文章分析neural style的内容,那篇算是neural style的起源,但是无法应用到实际工作上,为啥呢?它每次都需要指定好content image和style image,然后最小化content loss 和style loss去生成图像,时间花销很大,而且无法保存某种风格的model,所以每次生成图像都是训练一个model的过程,而fast neural style中能够将训练好的某种style的image的模型保存下来,然后对content image 进行transform,当然文中还提到了image transform的另一个应用方向:Super-Resolution,利用深度学习的技术将低分辨率的图像转换为高分辨率图像,现在在很多大型的互联网公司,尤其是视频网站上也有应用。
几个月前,就看了Neural Style相关的文章TensorFlow之深入理解Neural Style,A Neural Algorithm of Aritistic Style中构造了一个多层的卷积网络,通过最小化定义的content loss和style loss最后生成一个结合了content和style的图像,很有意思,而Perceptual Losses for Real-Time Style Transfer and Super-Resolution,通过使用perceptual loss来替代per-pixels loss使用pre-trained的vgg model来简化原先的loss计算,增加一个transform Network,直接生成Content image的style版本, 如何实现的呢,请看下图:
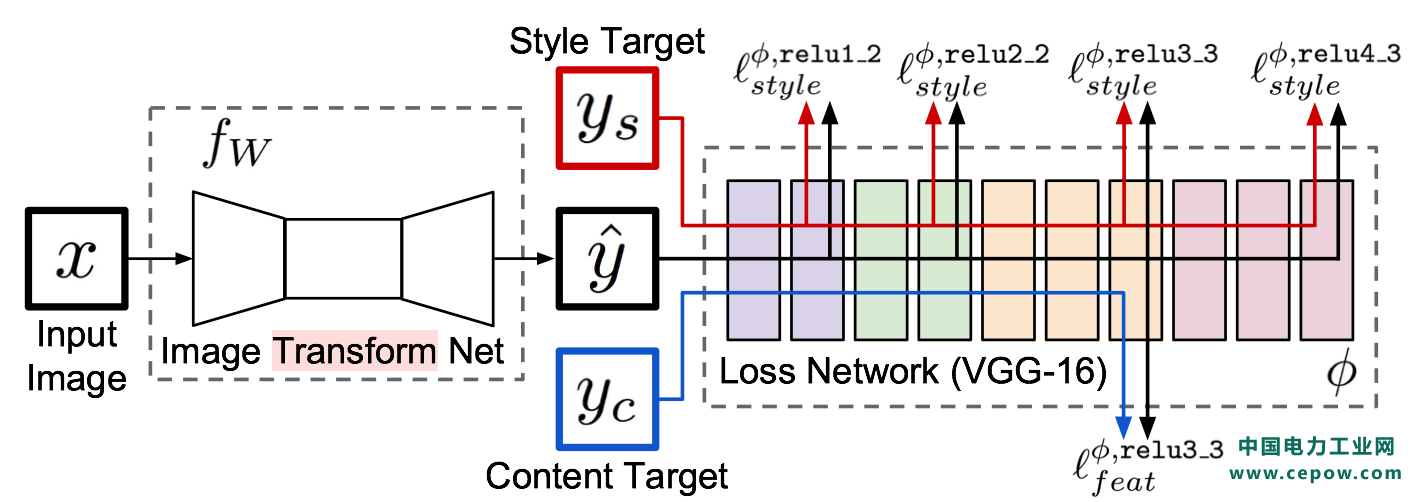
整个网络是由部分组成:image transformation network、 loss netwrok;Image Transformation network是一个deep residual conv netwrok,用来将输入图像(content image)直接transform为带有style的图像;而loss network参数是fixed的,这里的loss network和A Neural Algorithm of Aritistic Style中的网络结构一致,只是参数不做更新,只用来做content loss 和style loss的计算,这个就是所谓的perceptual loss,作者是这样解释的为Image Classification的pretrained的卷积模型已经很好的学习了perceptual和semantic information(场景和语义信息),所以后面的整个loss network仅仅是为了计算content loss和style loss,而不像A Neural Algorithm of Aritistic Style做更新这部分网络的参数,这里更新的是前面的transform network的参数,所以从整个网络结构上来看输入图像通过transform network得到转换的图像,然后计算对应的loss,整个网络通过最小化这个loss去update前面的transform network,是不是很简单?
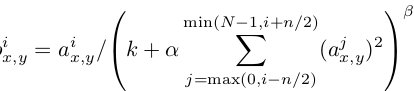
loss的计算也和之前的都很类似,content loss:

style loss:

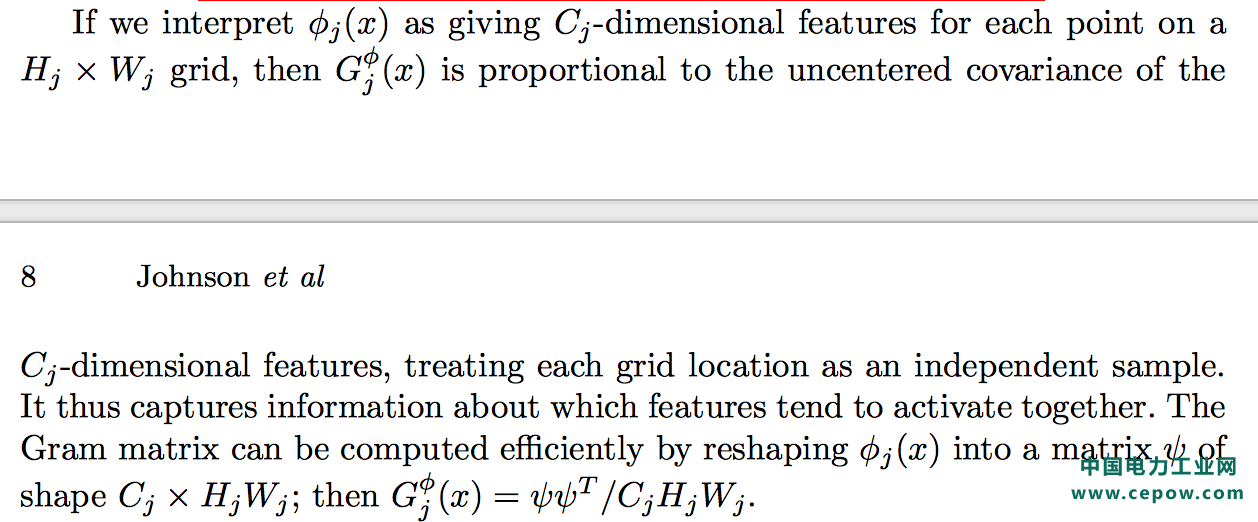
style loss中的gram matrix:

Gram Matrix是一个很重要的东西,他可以保证y^hat和y之间有同样的shape。 Gram的说明具体见paper这部分,作者这也解释不清楚,相信读者一看就明白:
相信看到这里就基本上明白了这篇paper在fast neural style是如何做的,总结一下:
|