技术
摘要:针对海上风电场中双馈风电机群,基于Hamilton能量理论提出分布式协同控制策略,使闭环系统全局稳定且输出同步。将双馈风电机组单机模型拓展为含风电场网络拓扑的机群模型,利用分布式Hamilton系统设计方法,构造风电场多机系统的分布式协同控制策略。进一步,考虑到实际系统输入能量有限的客观情况,提出输入有界情况下的分布式协同控制设计方法,保证闭环系统全局稳定且输出同步。最后,通过仿真验证,分布式协同控制策略增强了系统的适应性,而且在输入有界约束下仍具有较好的控制效果。
关键词 : 海上风电场; 分布式控制; 双馈风电机群; Hamilton能量方法; 协同控制;
DOI:10.13334/j.0258-8013.pcsee.152317
ABSTRACT
A distributed cooperative control strategy for doubly fed wind turbine groups in the offshore wind farms was proposed, which was based on Hamilton energy theory to make the closed-loop system globally stable and output synonous. The single-machine model of doubly fed wind turbines was extended to a cluster model with the network topology of wind farms. And the distributed cooperative control was constructed by using the design method of distributed Hamilton systems. Furthermore, considering the actual conditions of the input energy of the practical systems, the distributed cooperative control design method with bounded input was proposed to guarantee the global stability and the output synonization of the closed-loop system. The simulation results show that the distributed cooperative control strategy improves the adaptability of closed-loop systems, and has good control effects under the constraints of bounded input.
KEY WORDS : offshore wind farm; distributed control; doubly fed wind turbine group;Hamiltonian energy method; cooperative control;
王冰(1975),男,博士,副教授,研究方向为风力发电非线性控制、新能源控制技术,icekingking@hhu.edu.cn;
窦玉(1990),女,硕士研究生,研究方向为多智能体协调控制及应用;
王宏华(1963),男,博士,教授,研究方向为开关磁阻电机控制、先进控制理论及应用。
基金项目: 国家自然科学基金项目(51477042); Project Supported by National Nature Science Foundation of China (51477042);
文章编号: 0258-8013(2016)19-5279-09 中图分类号: TM614
0 引言
近十年,风力发电及其控制技术得到了快速的发展,取得了丰硕的成果[1-3]。随着风电场建设规模的扩大,以及单台机组控制技术的逐步成熟,对风电机组的研究由单机控制走向集群控制,如何对风电场中多台机组进行协调控制,成为关注的焦点[4-7]。另一方面,由于海上风电具有储量丰富、风速稳定、不占用土地资源等优点,海上风电场正逐步由规划变为现实,关于海上风电的研究也成为本领域的热点[8-9]。同时,海上风电带来的问题也不容忽视:大型化、深海化趋势,对可靠性提出了更高的要求;风电场离岸较远、无人值守,面对复杂多变的海上环境,对于控制的灵活性要求也越来越高。此时,仍沿用陆上风电的集中式控制就有些力不从心,因为集中控制也意味着集中风险,一旦通信线路或控制装置出现故障,就可能使整个海上风电场处于失控状态。所以,为了增加海上风电场运行的可靠性,尝试用分布式控制代替集中式控制,不仅可以分散风险,而且可以增加整个系统的灵活性。
分布式控制系统是空间分布的动态系统,其来源于大量的工程实例,比如飞行器的编队飞行、多机器人系统协作、无线传感网络等[10-11]。随着网络技术的迅猛发展和广泛应用,分布式控制系统向网络化、智能化和综合化发展的趋势日益显现[12-13]。具体到海上风电场,可将整个风电场作为一个分布式网络,每台风电机组是网络中的一个节点,通讯线路构成节点间的连线。整个系统通过网络连线彼此交换信息,在此基础上设计风电机组的控制律,形成分布式控制策略。分布式控制分散了集中式控制存在的风险,即便通讯或单机出现故障,也不会影响风电场的整体运行,并可将故障损失降到最低。为了获得风电场中的机群模型,需要对单台双馈风电机组模型进行改造,本文将采用Hamilton能量方法[14-15]。该方法根据系统的特点构造Hamilton能量函数,具有明确的物理背景与工程意义。而且,由于Hamilton函数从能量观点出发,避开了构造Lyapunov函数的困难,成为设计非线性系统控制器的有力工具。
本文基于Hamilton能量方法,先对单机系统进行Hamilton实现,获得双馈风电机组端口受控耗散Hamilton(port-controlled Hamilton with dissipation,PCH-D)系统模型。为获得海上风电场风电机群的网络化模型,引入图论的一些基本概念,将单机模型拓展为含风电场网络拓扑的机群模型。基于获得的模型,定义了风电机群的同步控制问题,进而设计分布式控制策略,使得风电机群通过相互协调达到输出同步。进一步,考虑到实际系统由于能量有限,控制输入存在饱和约束,将以上结果推广到输入有界的情况,设计相应的协同控制策略。最后,通过仿真分别验证:在风电机组出现故障、网络拓扑结构发生变化时,分布式控制策略的有效性;以及通过对比输入受约束和无约束两种情况,说明输入有界协同控制策略的利弊。
综上所述,本文的创新点包括3个方面:第一,展开海上风电场的分布式控制研究,提出不同于集中式控制的设计思路;第二,将分布式Hamilton系统设计方法应用于双馈风电机群的建模与控制中,将单机的Hamilton控制方法拓展为机群的分布式协同控制;第三,输入有界情况下的研究不仅是分布式Hamilton系统的理论成果,也符合控制输入能量有界的实际情况。
1 双馈风电单台机组Hamilton实现
1.1 双馈风电机组单机模型
双馈风力发电机组包括传动机构和双馈感应发电机,其中传动机构可表示为一阶模型,在忽略定子的电磁瞬态时可得到双馈感应发电机二阶模型。本文中,双馈风力发电机组三阶模型[16]如式(1)所示:
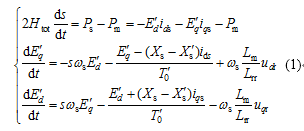
式中:Xs =ω s Lss;X's =ω s(Lss -L2m /Lrr);T'0 =Lrr /Rr;s为转子转差率;Htot为风机和发电机整体的惯性常数;Ps = -E'dids -E'qiqs为风电机组定子输出的有功功率;Qs =E'diqs -E'qids为风电机组定子输出的无功功率;Pm为风机输入的机械功率;Lss为定子自感;Lrr为转子自感;Lm为互感;Rr为转子电阻;ω s为同步角速度;Xs为定子电抗;X's为定子瞬态电抗;ids和iqs分别为d轴和q轴的定子电流;E'd和E'q分别为在瞬态电抗下的d轴和q轴电压;udr和uqr分别为d轴和q轴的转子电压。因此,式(1)是风电机组在d-q坐标系下的双输入三阶模型,其中s、E'd和E'q是状态,udr和uqr是输入。
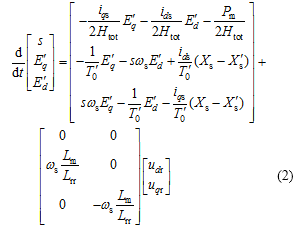
首先,将风电机组模型(1)改写为式(2)形式:
1.2 单机模型Hamilton实现
根据系统模型结构,Hamilton能量[17]函数可以设计为式(3)形式:
 基于以上能量函数,系统模型(2)可以表示为端口受控Hamilton(port-controlled Hamilton,PCH)系统形式:
基于以上能量函数,系统模型(2)可以表示为端口受控Hamilton(port-controlled Hamilton,PCH)系统形式:

式中 H= [s E'q+Pm /(2iqs)E'd+Pm /(2ids)]T。
为便于设计系统的反馈控制律,需将PCH系统进一步改写为PCH-D系统形式。因此,下面通过预反馈控制进行PCH-D系统实现。
设计以下控制律:
由上式可知,控制律分为两部分:预反馈K和输出反馈μ。为了使系统满足PCH-D形式,首先需要设计预反馈K,而输出反馈μ将在后面加以设 计。取:
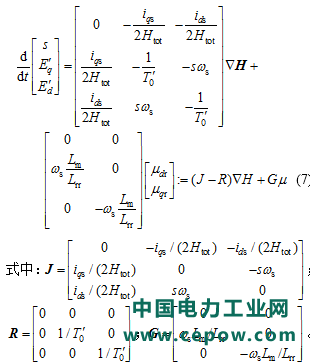
将预反馈控制(6)代入PCH系统(4)中,闭环系统转为PCH-D形式为
显然,J为斜对称矩阵,R为半正定矩阵。因此,模型(7)满足PCH-D形式。同时,输出函数可以表示为
2 双馈风电机群协同控制策略
2.1 图论基础
由海上风电场中相互连接的多台风电机组构成一个网络,每台机组则是其中的一个节点,相互之间由通讯网络交流各自的状态和参数,这是本文协同控制的网络基础[18]。
考虑相互作用的n个节点,节点间的相互关系用无向图或有向图来表示。对于任意一个拓扑结构G,可用节点集V= {v1,v2,•••,vN}和边集EV×V来表示。如果拓扑中的边是节点的无序对(vi,vj) = (vj,vi),则称该图为无向图;类似地,如果拓扑中的边是节点间的有序对(vi,vj) (vj,vi),则称该图为有向图。A= [aij]表示邻接矩阵。当(vi,vj) E时,aij 0;否则,aij= 0。节点vi的邻节点集可表示为Ni= {vj: (vj,vi) E}。节点i的入度di(即矩阵A第i行元
素之和)定义为di=∑j∈Niaijdi=∑j∈Niaij。入度矩阵D定义为D=
diag{di}。进而,图的Laplacian矩阵L定义为L=D-A。如果拓扑结构中任意两个节点间都存在一条路径,对于无向图,称为连通图;对于有向图,则称为强连通图。
2.2 输出同步问题描述
在图论的基础上,对双馈风电机组PCH-D模型(7)进行拓展,得到发电机群的模型,并进一步给出输出同步问题的定义。文中,如不特别说明,i= 1, 2,•••,N。
考虑风电机群的PCH-D系统描述为

式中:第i台风电机组状态为xi= [si E'qi E'di]T,输入μi= [μdri μqri]T,输出yi= [ω siLmi[E'qi+Pmi/ (2iqsi)]/Lrri-ω siLmi[E'di+Pmi/(2idsi)]/Lrri]T,Hamilton能量函数Hi的梯度 Hi= [si E'qi+Pmi/(2iqsi)E'di+Pmi/(2idsi)]T,下标i说明为第i台机组的参数。
系统(9)的输出同步定义如下。
定义1[19] 对于N个PCH-D节点组成的网络系统(9),如果各节点输出满足:
limt→∞||y